
Le but des recherches menées à l’INRIA Rhône-Alpes sur la marche artificielle est de mieux comprendre la marche humaine en utilisant les outils théoriques de la robotique (mécanique, automatique,…).Coté expérimentations, il y a trois principaux pôles:
- une plateforme de capture de mouvement
- un robot Kondo pour explorer les robots bas-coûts
- un robot Biped
Acquisition et capture de mouvement
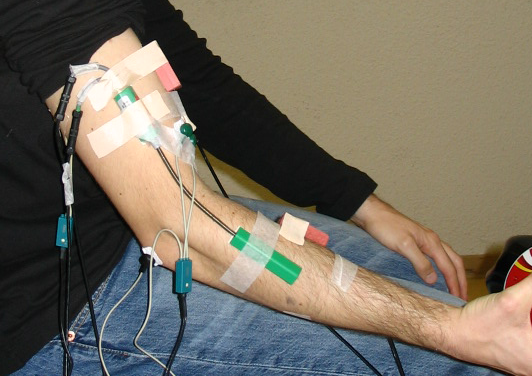 |
Nous avons mis en place une plateforme matérielle et logicielle pour faciliter l’acquisition de données et la capture de mouvement. Pour l’acquisition de données, nous disposons d’une station d’acquisition sous Windows XP avec des cartes National Instruments qui permet d’enregistrer 48 entrées analogiques. Cette station est utilisée pour réaliser des expérimentations de capture de mouvement en utilisant différents capteurs (capteur inertiel, EMG, capteur de pression,…).Nous disposons également de capteurs spécifiques comme:
Les expérimentations vont de la capture de mouvement pour des études dans le cadre de la réhabilitation ou la caractérisation de capteurs. Des expérimentations dans d’autres domaines comme la mesure de consommation d’un |
Les projets qui l’utilisent
Robot Kondo
 |
Le robot KHR-1 de Kondo est un petit robot humanoïde bas-coût:
Pour réaliser des expérimentations, le robot est intégré dans le simulateur HuManS et nous l’avons doté de capteurs: semelles avec des capteurs de pression et capteur d’attitude. |
Les projets qui l’utilisent
Robot Biped
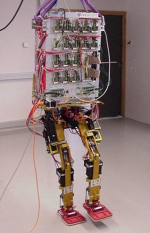 |
Le robot Bipède dont la conception mécanique a été réalisée par le Laboratoire de Mécanique des Solides de Poitiers possède 15 degrés de liberté : 6 par jambe (2 à la cheville, 1 au genou, 3 à la hanche) et 3 pour articuler le tronc.Le service a réalisé le contrôleur robotique matériel et logiciel (ORCCAD). |
Les démonstrations
 |
Le robot en posture statique: « balayage avant » |
|
Le robot en posture statique: « 3 postures » |
Vous pouvez trouver plus de résultats sur le site du projet Bipop
Les projets qui l’utilisent
- Bipop
- Demar
- Laboratoire de Mécanique des Solides de Poitiers