Réalisations
 Supports pour caméra 3D (2017): pour robot NAO et tête stéréo |
 Support stéréoscopique (2006): 3 dof pour 2 caméras |
 Bâton de calibration pour la vision (2003) |
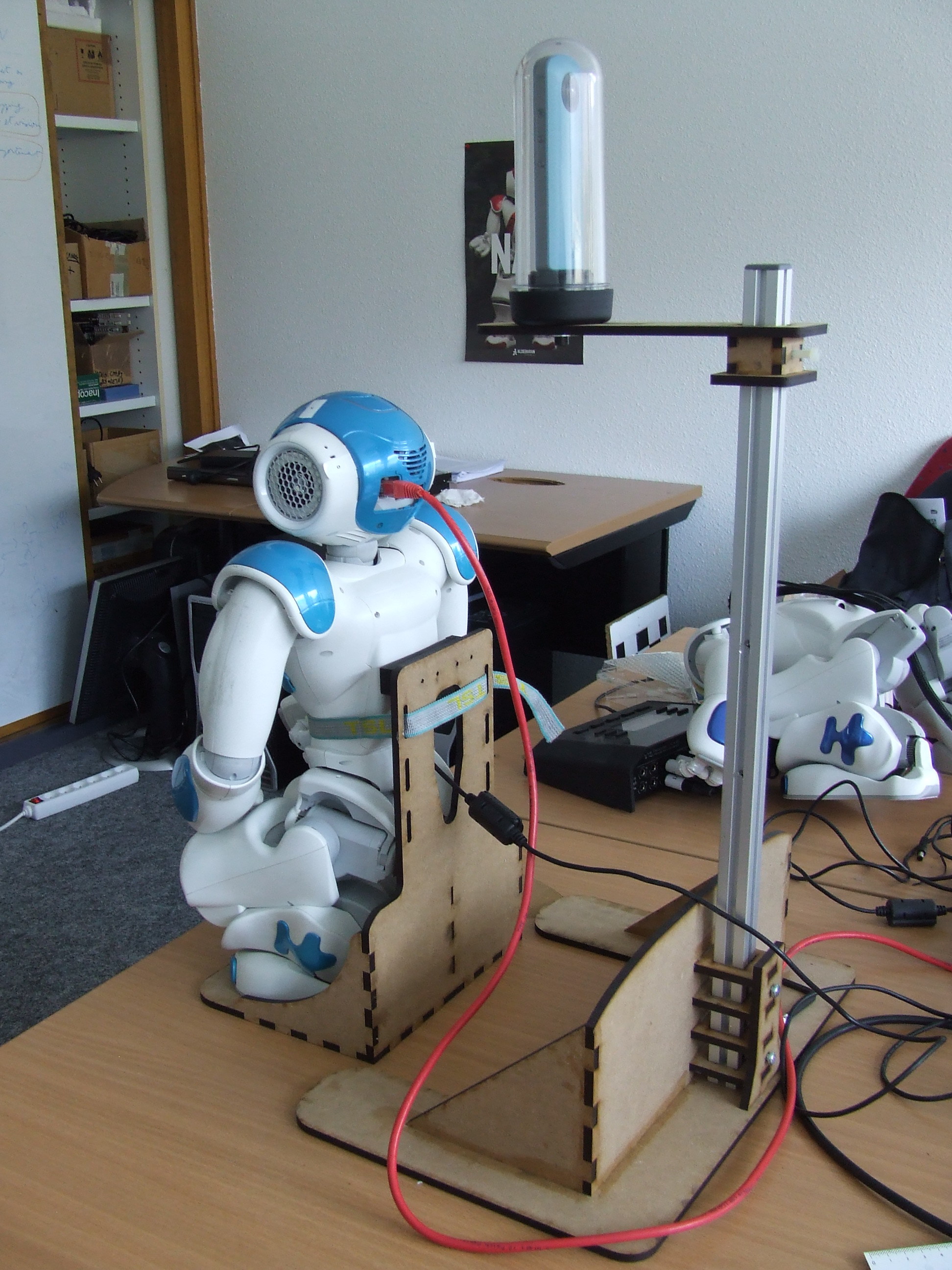
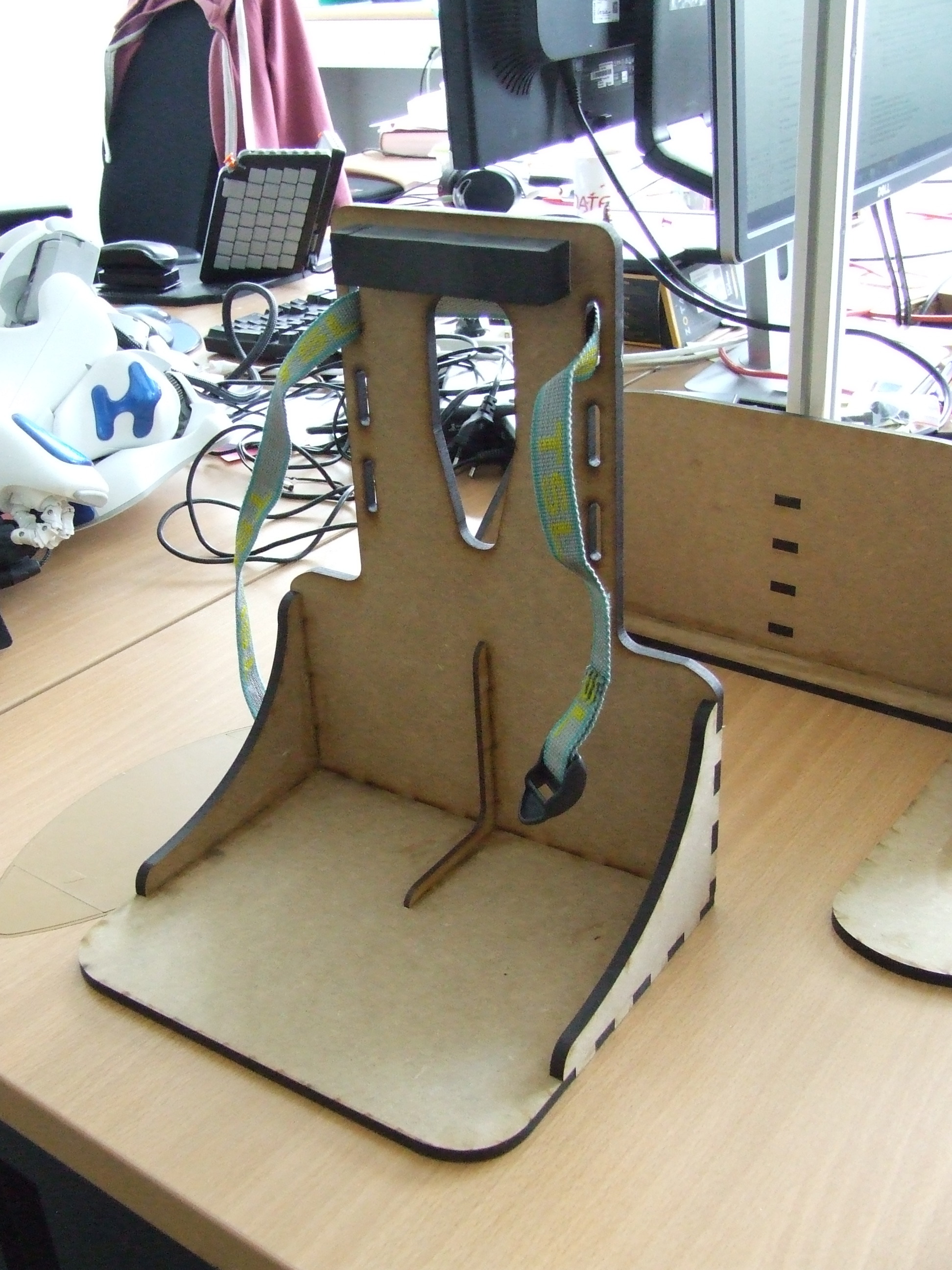
Supports pour caméra 3D pour robot NAO et tête stéréoscopique
- Année: 2017
- Projet : EPI Perception
- Description:


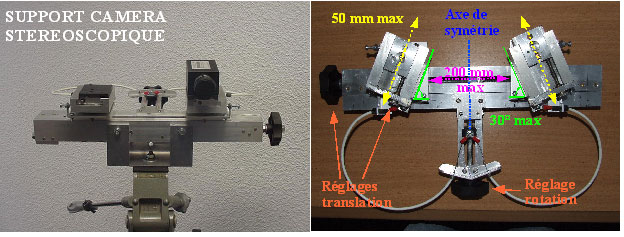
Support stéréoscopique 3 ddl (3 dof) pour 2 caméras
- Année: 2006
- Projet : RIAM
- Description:
Ce prototype permet de travailler sur les algorithmes de calibrage, de stéréoscopie et d’interpolation de points de vue.
Une version définitive avec moteurs et encodeurs « motion control », devrait être livrée dans le courant de cette année.
Sur la photo 1, il est équipé de 2 caméras couleur JAI CV-M7+CL d’une résolution 1380 x 1030, 24f-ps.Caractéristiques: photo 4
Déplacement en translation de 0 à 220 mm (+ ou – 110 mm par rapport à l’axe de symétrie – le réglage affecte les 2 caméras)
Rotation, de 0 à 30° max (en position 0° = les 2 caméras sont parallèles – le réglage affecte les 2 caméras)
en translation (réglage indépendant de chaque caméra) 50 mm.
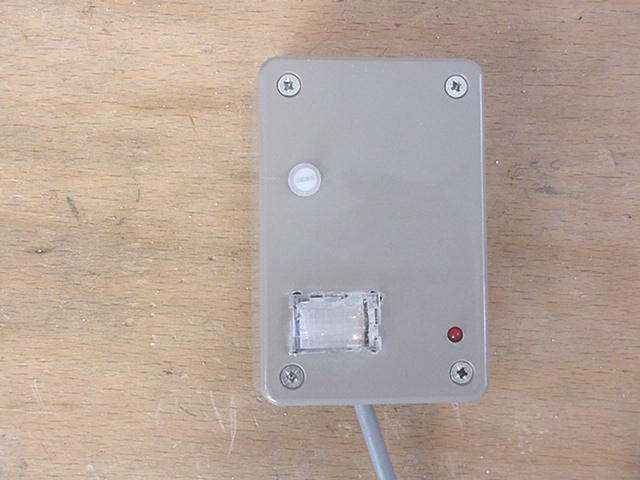
Bâton de calibration pour la vision
- Année : 2003
- Plate-forme : Perception (ex MOVI)
- Description:
Matériels utilisés:
- profilé aluminium (T)
- 2 flashes récupérés sur des appareils photos jetables
- 1 pile 1,5 volts
- 2 boules blanches
Cet objet est utilisable pour un étalonnage de caméras de surveillance.
En le plaçant de manière appropriée dans le champs d’une caméra on obtient des images.
Grâce aux signalements (boules blanches + flashes), à un traitement d’images automatique et à des calculs géométriques, divers paramètres de la caméra peuvent être déterminés aisément et « sans contact » (longueur focale, hauteur à laquelle la caméra est installée et attitude (rotation)).