Réalisations
 Robot bipède NAO (2016) : Plate-forme mesure d’angles Robot bipède NAO (2016) : Plate-forme mesure d’angles |
 Robot bipède Kondo (2005) : Plate-forme posturale Robot bipède Kondo (2005) : Plate-forme posturale |
 Demar (2004) : Prothèse de genou instrumentée Demar (2004) : Prothèse de genou instrumentée |
 Robot mobile Biba (2003-2004) : Chargeur, distributeurs de jetons et Obturateur rayon laser Robot mobile Biba (2003-2004) : Chargeur, distributeurs de jetons et Obturateur rayon laser |
Robot Bipède NAO : Plate-forme de mesure d’angles
- Année: 2016
- Plate-forme : Robotique bipède NAO, EPI Perception
- Description:
Support pour le NAO qui fournit une graduation en angle et un support pour haut parleur à rajouter au support pour la mesure d’angle.



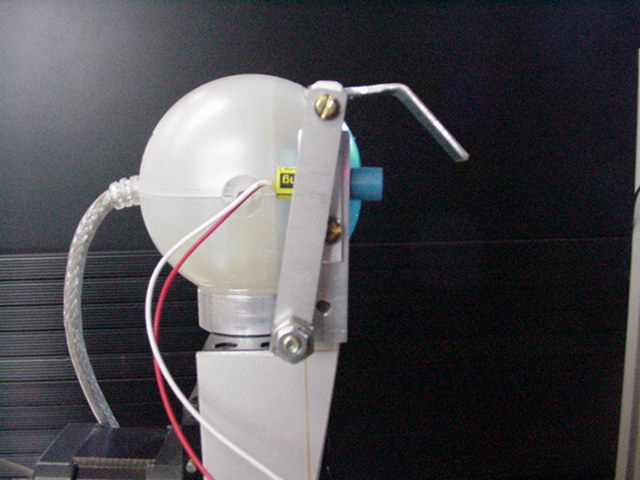
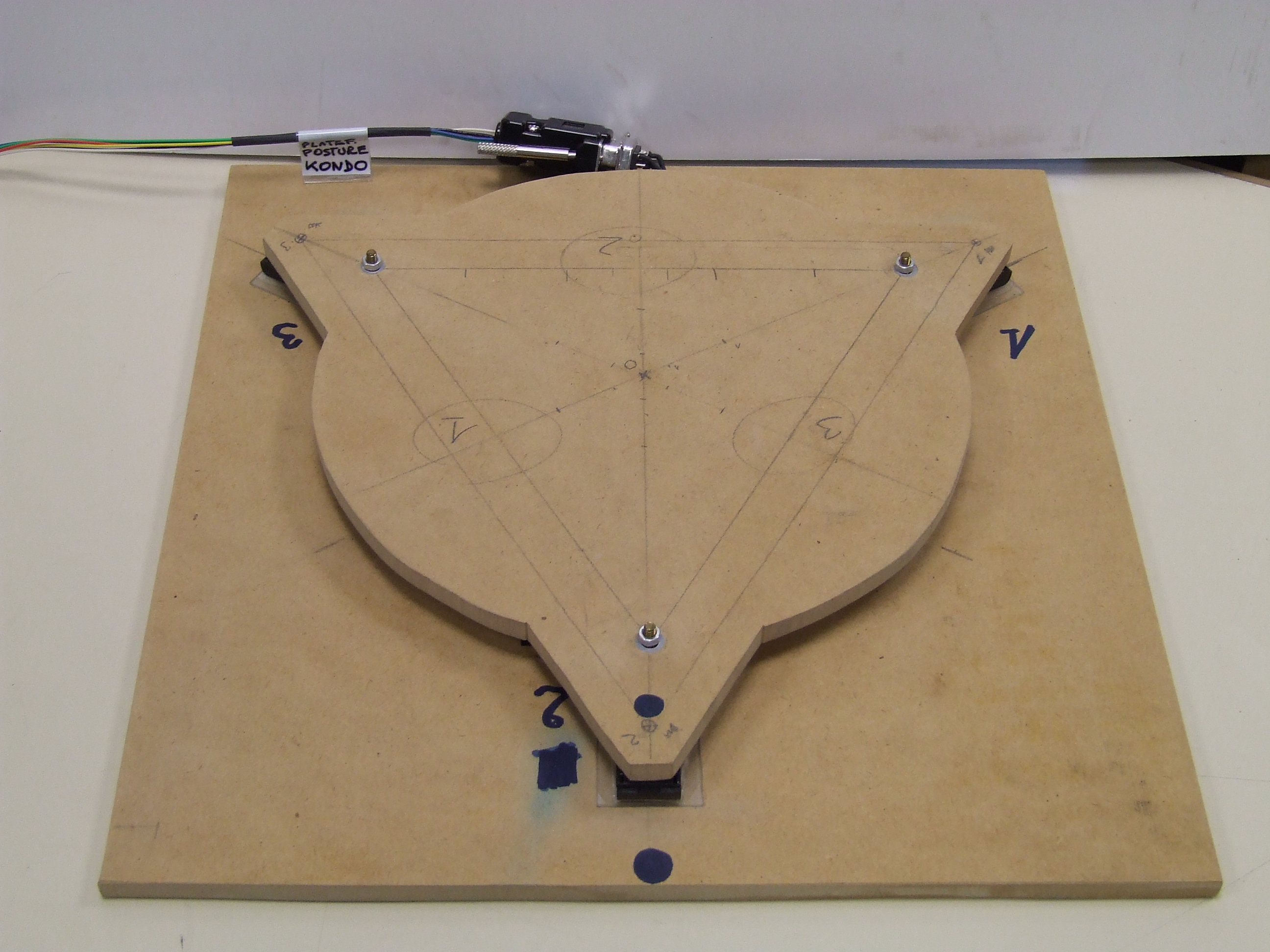
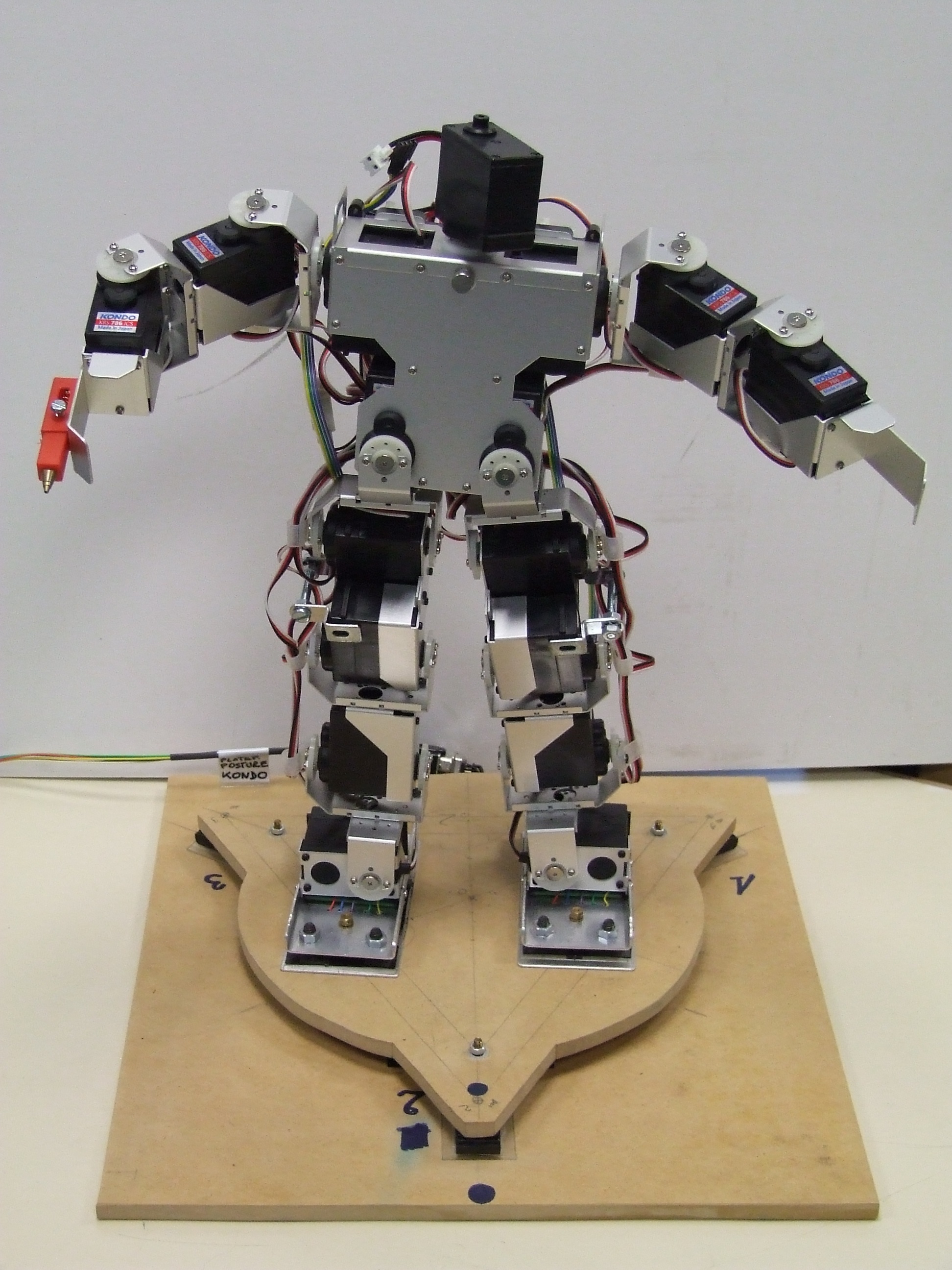
Robot Bipède Kondo : Plate-forme posturale
- Année: 2005
- Plate-forme : Robotique bipède Kondo, service SED
- Description:
Cette plate-forme posturale met en œuvre 3 capteurs piézoélectriques (« FORCE SENSOR » Honeywel ref FS03).
Chaque capteur permet la mesure de poids compris entre 0 et 1200 grammes.
Ce système a été utilisé dernièrement avec le robot KONDO, pour valider le logiciel HuMAns (a Scilab toolbox for Humanoid Motion Analysis and Simulation).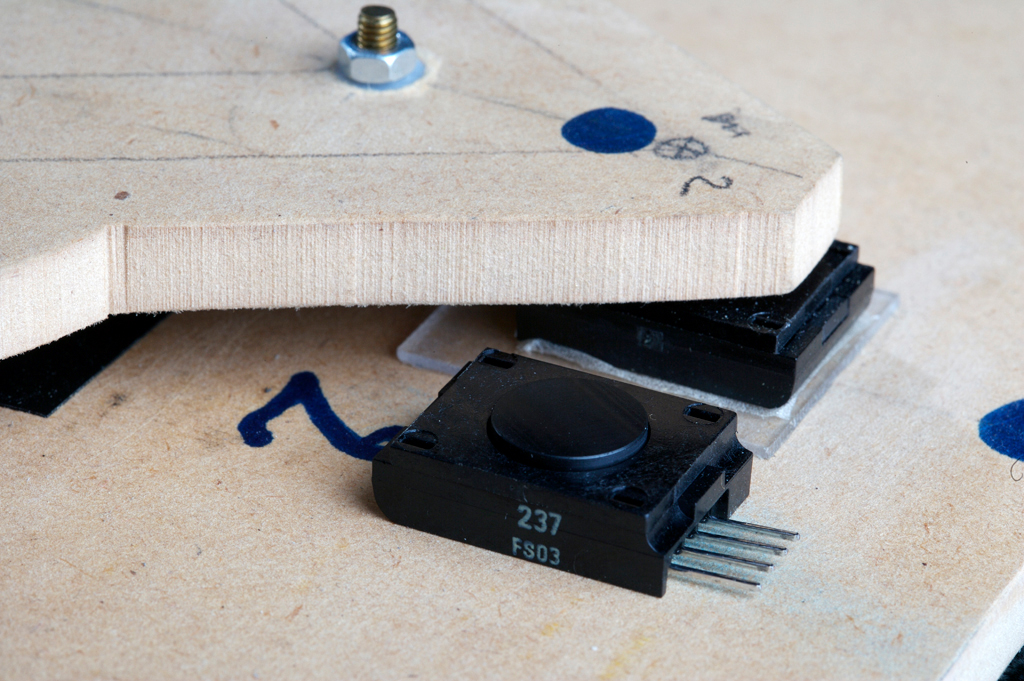
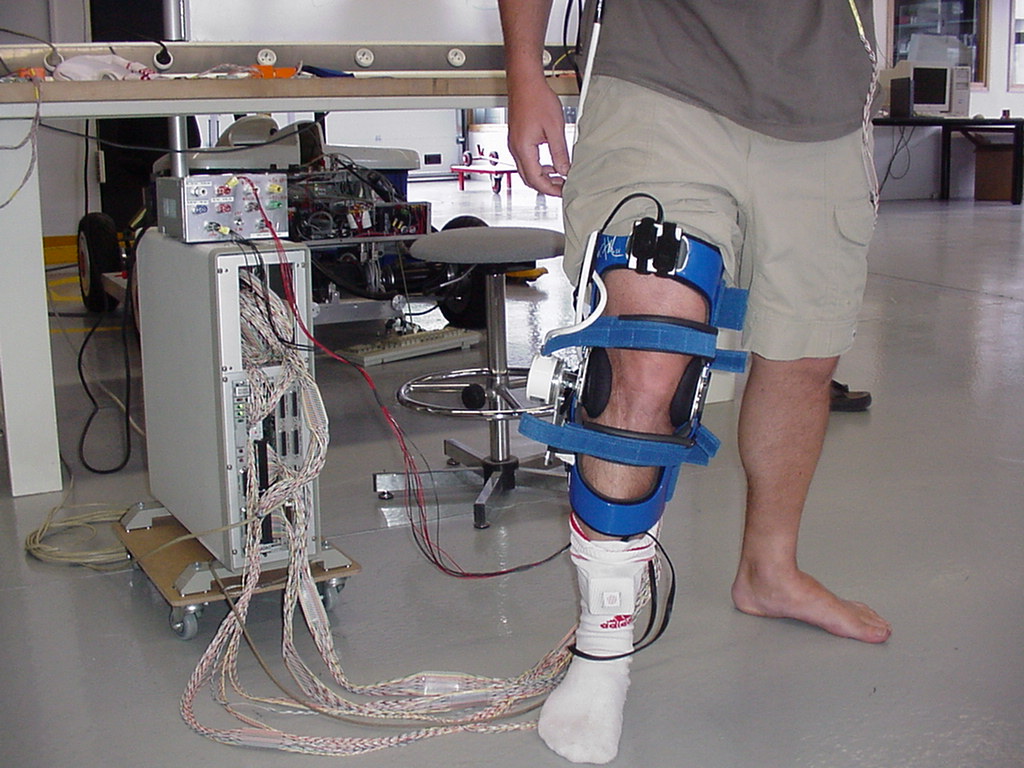
Prothèse de genou instrumentée
- Année : 2004
- Projet : EPI DeMaR
- Description:
L’INRIA Rhône-Alpes possède une grande expérience dans les domaines de la biomécanique et de la synthèse de la marche ; ses travaux sont expérimentés et illustrés sur un robot bipède marcheur BIP dont les caractéristiques des membres inférieurs sont anthropomorphes.
Les applications potentielles de ces travaux à l’homme dans le domaine de la marche artificielle sont nombreuses: prothèses actives, orthèses actives ou exo-squelettes, électro-stimulation fonctionnelle. Le point-clé pour la réussite de ces applications est bien sûr de comprendre encore mieux la marche humaine mais également d’être capable de doter l’homme de capteurs de mouvement pour intégrer leurs informations dans la boucle de marche. La grande expérience et la compétence du CEA/LETI dans le domaine des capteurs
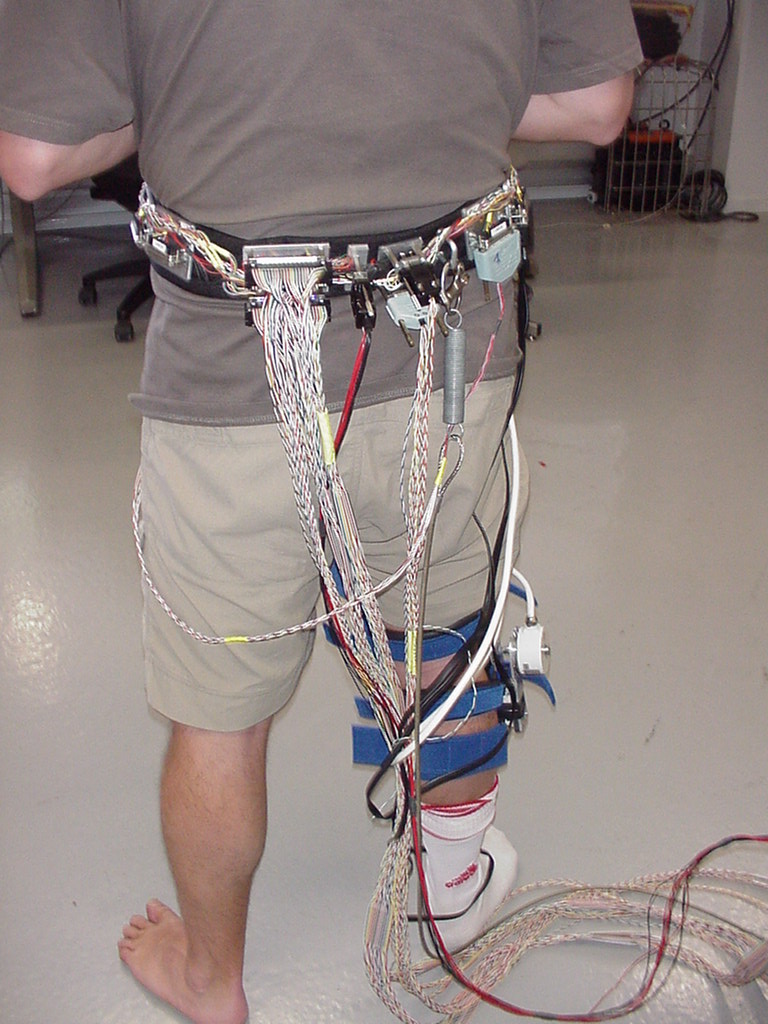
intégrés est indispensable pour « instrumenter des humains ». Il est en effet nécessaire pour les applications visées de disposer de capteurs très peu invasifs, à basse-consommation et le plus intégrés possible.Cette orthèse a été équipée d’un codeur incrémental et d’une centrale d’attitude (6 accéléromètres + 6 magnétomètres).
La ceinture est équipée de connecteurs qui assurent la liaison PC –> capteurs.
Robot mobile Biba : Chargeur, distributeurs de jetons et obturateur de rayon laser
- Année : 2003 et 2004
- Plate-forme : Robot Biba, EPI e-Motion
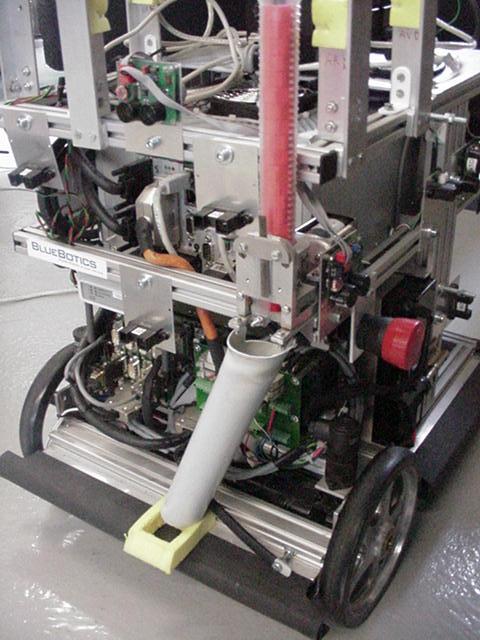
- Vue générale du robot
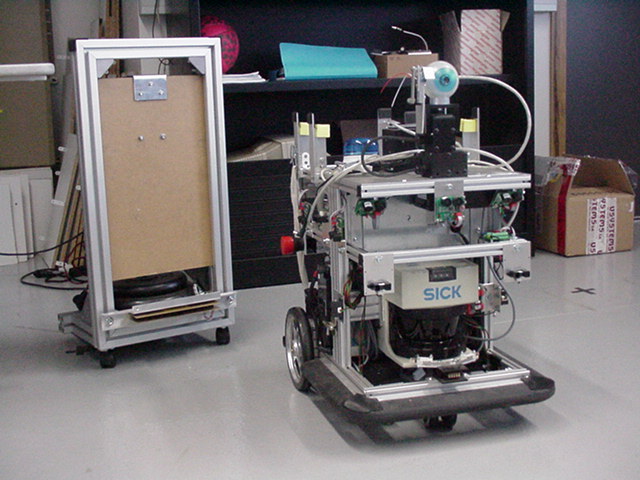
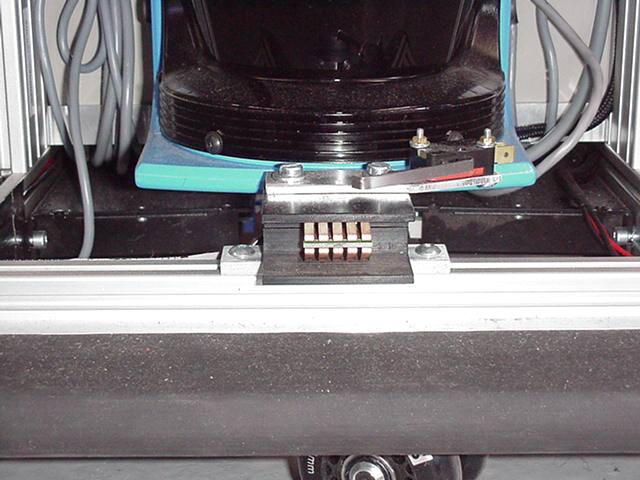
- Description: Chargeur
Quand le robot détecte que le niveau de ses batteries est bas, il vient se connecter sur le chargeur.
Afin l’ensemble ne bouge pas lors de l’arrimage, des poids sont fixés sur la structure aluminium.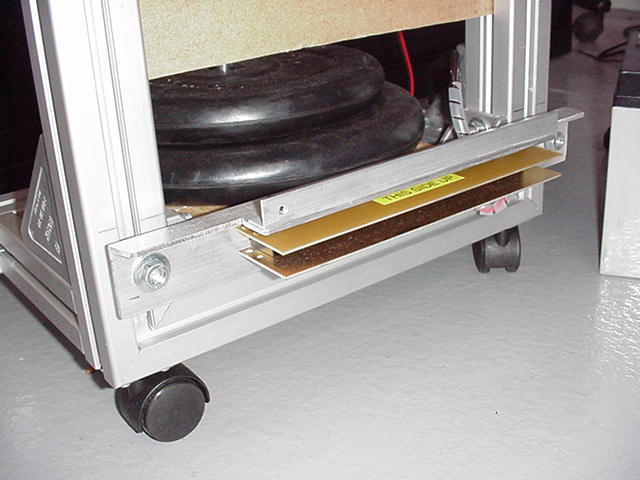
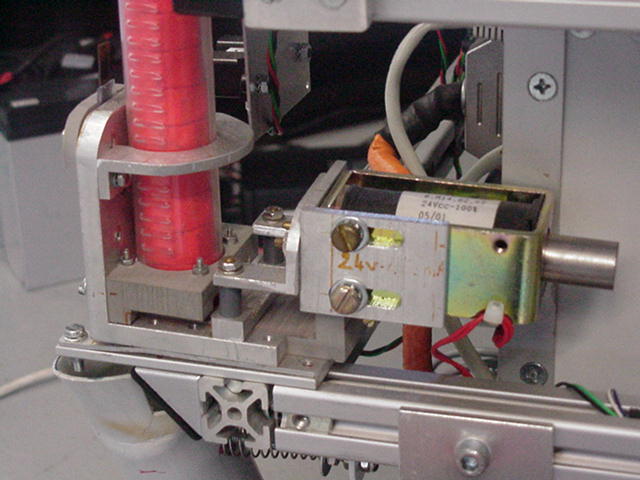
- Description : Le distributeur de jetons
Le but est de laisser des traces sur la trajectoire du robot Biba.
Ce dispositif est constitué:- D’un réservoir de 20 jetons (Boulons de 17 en teflon peint en
rouge) - Du mécanisme à ressort qui gère le « largage » du jeton
- D’un électroaimant qui actionne le mécanisme
- D’un tube qui oriente le jeton vers le centre du robot (avec un système d’amortissement de la chute en partie inférieure)
- D’un réservoir de 20 jetons (Boulons de 17 en teflon peint en
- Description : L’obturateur de rayon laser
Un émetteur laser a été fixé dans l’axe de visée de la caméra.
L’obturateur voile le rayon laser quand il y a des risques d’éblouissement pour les personnes.